Diffusion UQ on DrivAerML¶
Generative uncertainty quantification for steady CFD fields on top of the AB-UPT backbone via data-space diffusion — denoise surface + volume fields directly at anchor positions, with one backbone forward per Euler step. An ensemble of draws yields per-point std, calibration of integrated quantities (Cd, Cl).
The recipe is a uv-managed package (pyproject.toml) that pulls
emmiai-noether and aero-cfd-recipe as editable path deps, so it picks up
the surrounding repo’s src/ and the sibling aero_cfd recipe automatically.
Method¶
We train a flow matching model in the data space of field values. Concretely:
Objective. FM Velocity prediction along the straight-line rectified-flow interpolant between Gaussian noise and the clean target. One Euler step = one AB-UPT forward.
Conditioning. Geometry comes in via the standard AB-UPT supernode + anchor pipeline; the diffusion time
t ∈ [0, 1]enters via DiT-style (Peebles & Xie, 2022) adaptive layer norm on every transformer block. Noisy field values are concatenated to the anchor inputs.Optional minibatch-OT pairing.
--minibatch-otpairs noise / target samples within a batch by optimal transport (Tong et al., 2023) for straighter, lower-variance trajectories.UQ. A trained model is sampled
Ntimes per geometry from independent noise seeds; the per-point sample std is the uncertainty estimate, and the ensemble mean is the point prediction.
Training¶
Data-space diffusion (flow matching)¶
uv run python -m scripts.train_dataspace_diffusion \
--dataset-root $DATASET \
--output-path ./outputs/abupt_diffusion \
--paradigm flow_matching \
--max-epochs 500 --batch-size 1 --lr 5e-5 \
--ema-decays 0.9999
Defaults match the reported run: 9.1M params, hidden 192, 3 heads, 16K
supernodes, 65K geometry points, 16K surface + 16K volume anchors. Pass
--minibatch-ot to enable OT pairing.
Regression baseline¶
--paradigm regression swaps in AeroABUPT + WeightedLossTrainer for a
deterministic baseline at matched backbone, geometry budget, and optimizer
schedule. run_abupt_regression.sbatch.
SLURM¶
File |
Stage |
|---|---|
|
data-space diffusion (full hyperparams baked in) |
|
deterministic AeroABUPT baseline |
Both launchers prepend $SLURM_JOB_ID to config.run_id so wandb and
output dirs trace back to the job.
Evaluation¶
Single-GPU eval scripts that load a trained checkpoint and dispatch
in-process via noether.inference.evaluate:
Script |
What it does |
|---|---|
|
Side-by-side metrics for multiple Euler-step counts ( |
|
Draws |
|
Builds the tables and Plotly bar charts shown below from |
Example:
uv run python -m scripts.eval_uq \
--run-dir outputs/abupt_diffusion/30035_2026-05-11_spk1e \
--n-uq-samples 10 --sampling-steps 10 \
--resume-checkpoint best_model.loss.test.total
At eval time eval_uq re-enables surface_normals, surface_area, and
use_surface_position_as_input (training omits them) so Cd / Cl integration
finds its inputs.
Report¶
Final test-set L2 errors for the data-space diffusion model (10 Euler sampling steps) versus the deterministic regression baseline. The two runs share the same AB-UPT backbone, geometry budget, and optimizer schedule, so wall-clock training cost and parameter count are roughly matched — the diffusion model just adds the per-anchor noise input and DiT-style time conditioning on top.
[!NOTE] Caveat. The learning rate was not swept for these experiments; it was reused as-is from the regression configuration (
5e-5). Flow-matching objectives have a different loss landscape than direct regression and typically tolerate (and benefit from) larger LRs and longer schedules. The numbers below should therefore be read as a lower bound on what the FM model can achieve — a tuned LR and a longer training budget would very likely close, and on the smooth fields possibly reverse, the gap to the regression baseline.
Field |
Regression baseline |
Diffusion (10 steps) |
Δ (diff − base) |
Relative |
|---|---|---|---|---|
|
0.0905 |
0.0973 |
+0.0069 |
+7.6% |
|
0.0473 |
0.0498 |
+0.0025 |
+5.4% |
|
0.0790 |
0.0872 |
+0.0082 |
+10.4% |
|
0.0753 |
0.0800 |
+0.0047 |
+6.3% |
|
1.1150 |
0.4173 |
-0.6977 |
-62.6% |
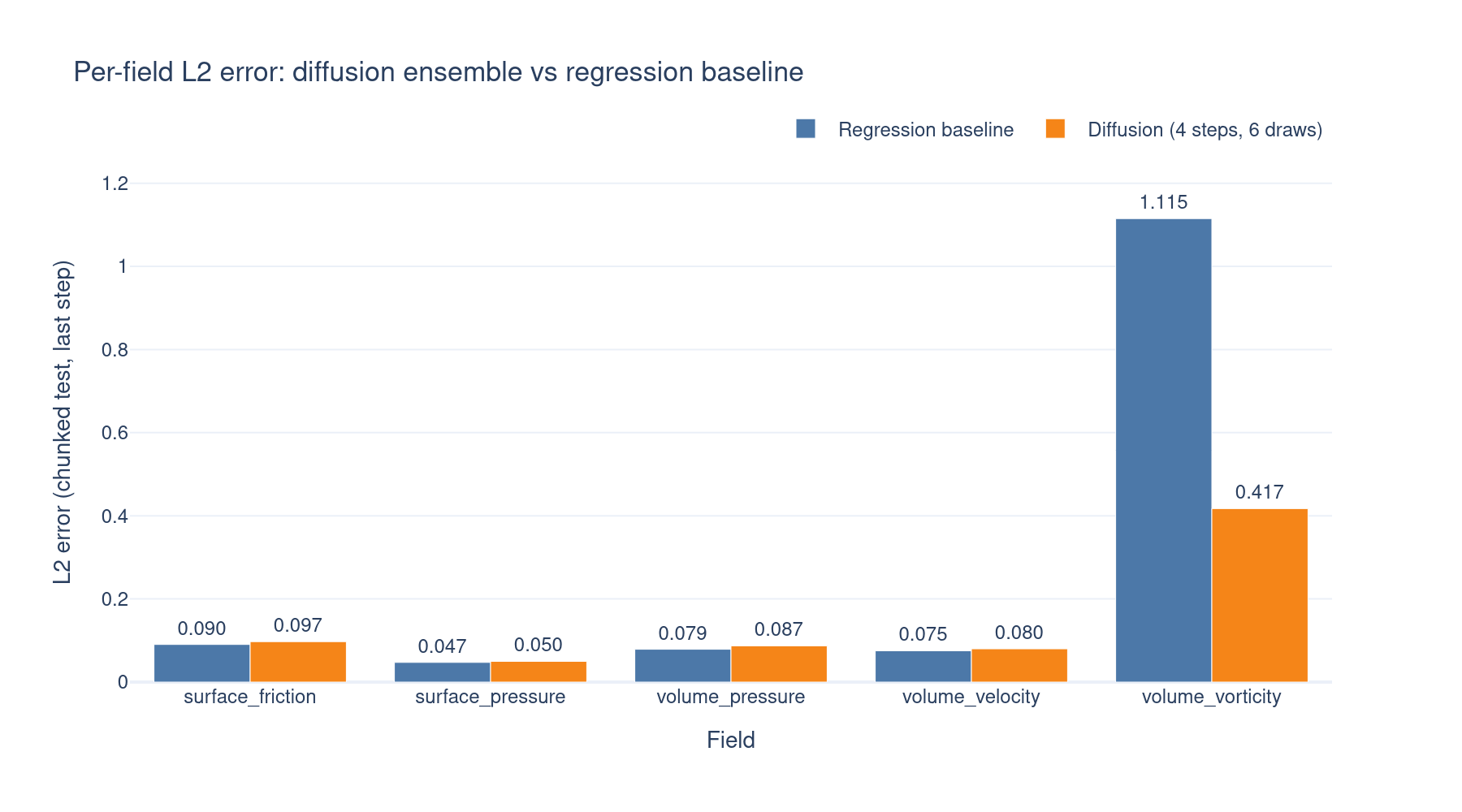
The evaluation was on the whole-mesh of the test split of our subsampled DrivAerML testset using only anchors for inference. The difference between baseline and flow-matching models on all primary metrics is marginal. The exception is volume_vorticity, where the diffusion does significantly better. This can mostly attributed to non-ideal hyperparamters of the baseline and high variance of this property.
Sampling-steps sweep¶
Single-draw deterministic L2 errors (loss/test/<field>_l2err/last) read
from the eval_steps<N>/ siblings of the diffusion run — i.e. the same
checkpoint sampled with different Euler-step counts. Useful for picking the
cheapest step count that still hits the accuracy floor.
Field |
1 step |
2 steps |
3 steps |
4 steps |
5 steps |
8 steps |
16 steps |
|---|---|---|---|---|---|---|---|
|
0.2183 |
0.0963 |
0.0932 |
0.0932 |
0.0938 |
0.0962 |
0.1001 |
|
0.1387 |
0.0522 |
0.0492 |
0.0487 |
0.0488 |
0.0497 |
0.0514 |
|
0.2263 |
0.0893 |
0.0854 |
0.0853 |
0.0858 |
0.0879 |
0.0912 |
|
0.1957 |
0.0769 |
0.0752 |
0.0757 |
0.0766 |
0.0792 |
0.0832 |
|
7.7955 |
0.3061 |
0.2545 |
0.2466 |
0.2485 |
0.2659 |
0.3050 |
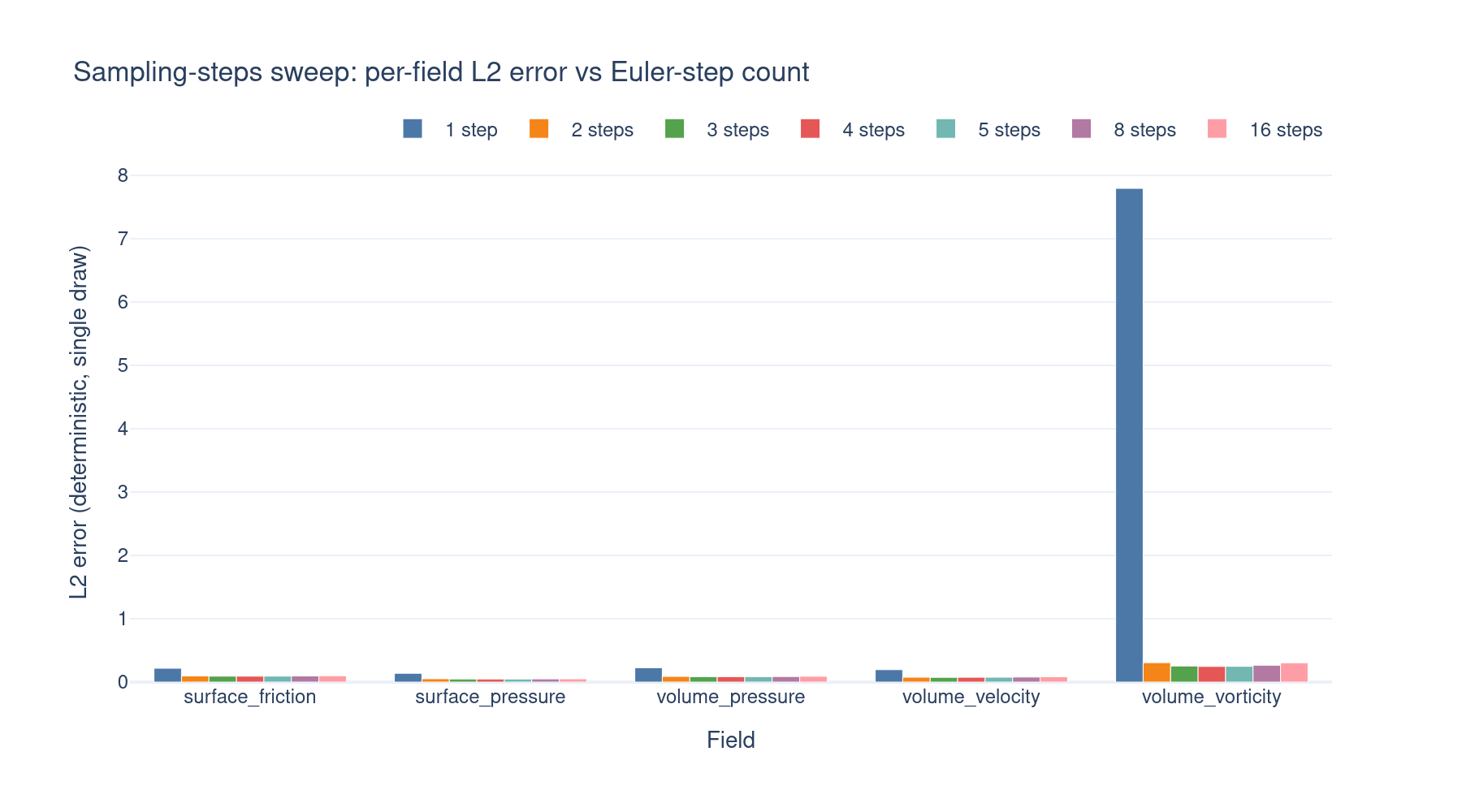
One Euler step is far off (the flow can’t resolve volume_vorticity at all),
but two steps already collapse the error to near-optimal. The minimum sits
at 3–4 steps for every field; beyond that, accuracy drifts back up slightly
— the rectified-flow trajectory is approximated more finely, but per-step
error accumulates faster than the discretization gain. Rectified flow’s
straight-line interpolant is the reason 2 steps already get close: under a
perfectly straight trajectory, one Euler step would be exact.
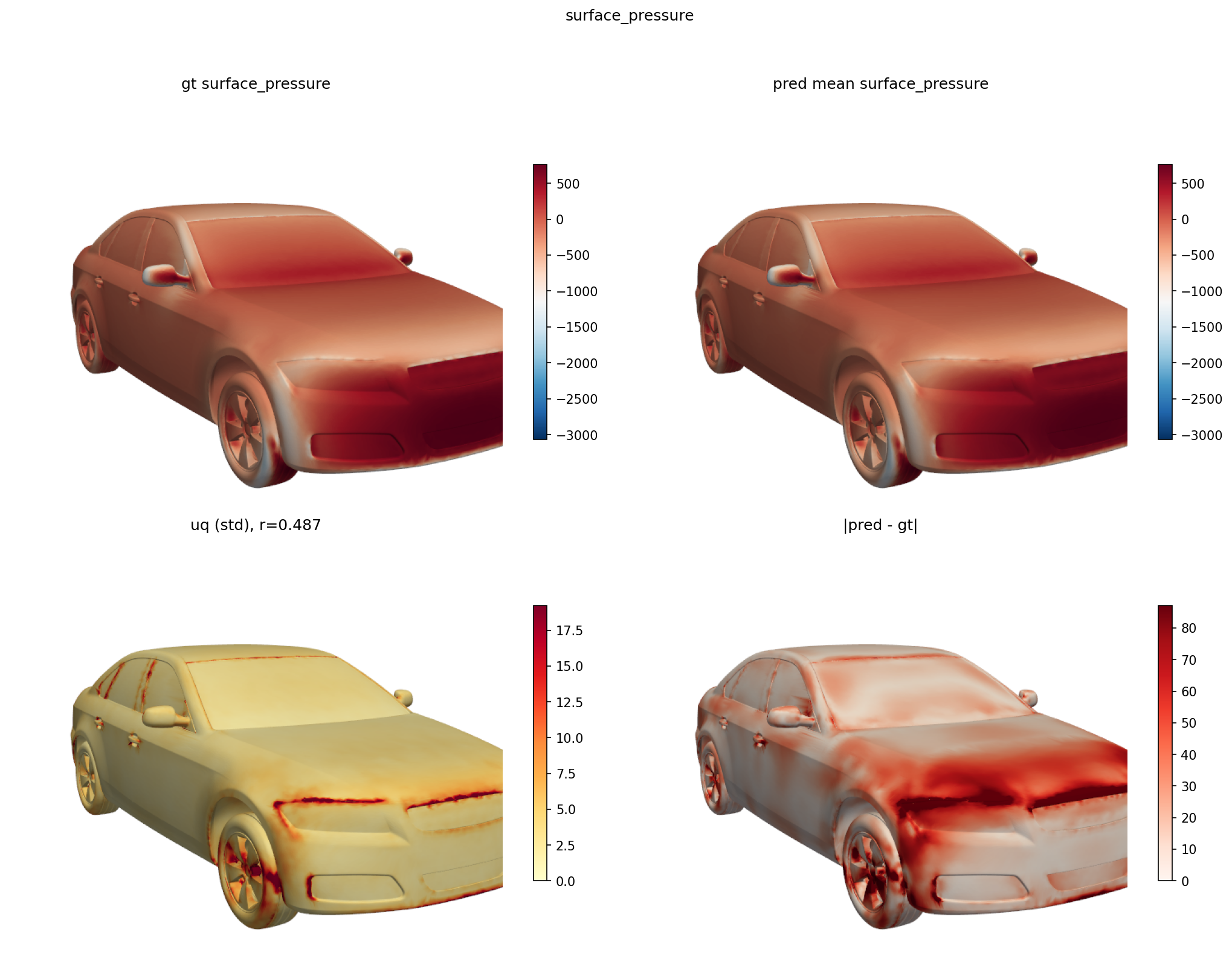
Uncertainty quantification¶
For each field, we draw 6 samples per geometry (4 Euler steps) and compute
the per-point standard deviation across draws. The metric below is the
Pearson correlation between that per-point std and the per-point absolute
error against ground truth on the test set
(loss/chunked_test/<field>_uq_corr/last). A high value means the model’s
own spread is a reliable proxy for where it’s wrong — i.e. the uncertainty
is calibrated in shape, even if not in scale.
Field |
Pearson r(std, |error|) |
|---|---|
|
0.579 |
|
0.369 |
|
0.559 |
|
0.445 |
|
0.501 |
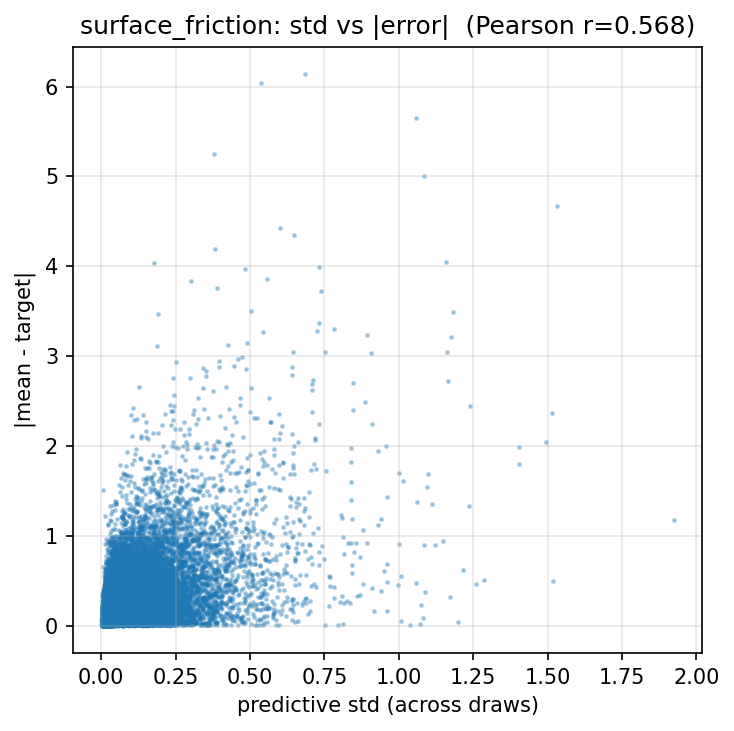
All correlations are positive — the ensemble std flags the right regions in
every field — but they sit in the 0.37–0.58 range, so the signal is
informative rather than precise. surface_friction and volume_pressure
calibrate best; surface_pressure is the weakest, consistent with it also
being the field where the ensemble mean lags the regression baseline most
(+65.5%). The Cd / Cl coverage numbers in the same summary show the
complementary scale problem: the integrated-coefficient std is too tight
(empirical 1-σ coverage is 0, mean |z| ≈ 8–10), so the per-point shape is
useful for triage but the scale would need recalibration (e.g. temperature
scaling on the std, or a held-out calibration set) before being used for
hard confidence intervals.
Project structure¶
diffusion_uq/
├── pyproject.toml # uv package: noether + aero_cfd as editable deps
├── experiments.py # build_abupt_config — single factory for regression + diffusion
├── models/diffusion_abupt.py # DiffusionABUPT (data-space, DiT-style time modulation)
├── trainer/diffusion_ab_upt_trainer.py # DiffusionABUPTTrainer + schedule_config
├── callbacks/
│ ├── dataspace_diffusion_chunked_eval.py # periodic + full-mesh chunked eval
│ └── dataspace_diffusion_uq.py # ensemble UQ (std-vs-error, Cd/Cl calibration)
├── scripts/
│ ├── train_dataspace_diffusion.py
│ ├── eval_sampling_steps_sweep.py
│ ├── eval_uq.py
│ └── report.py # comparison + step-sweep + UQ tables & Plotly bars
├── run_abupt_diffusion.sbatch
└── run_abupt_regression.sbatch
References¶
AB-UPT — Alkin et al., 2025 — https://arxiv.org/abs/2502.09587
DrivAerML benchmark — Ashton et al., 2024 — https://arxiv.org/abs/2408.11969
Flow Matching for Generative Modeling — Lipman et al., 2022 — https://arxiv.org/abs/2210.02747
Rectified Flow — Liu et al., 2022 — https://arxiv.org/abs/2209.03003
DiT (Scalable Diffusion Models with Transformers) — Peebles & Xie, 2022 — https://arxiv.org/abs/2212.09748
Minibatch OT for Flow Matching — Tong et al., 2023 — https://arxiv.org/abs/2302.00482